
产品中心
热门产品




四旋翼无人机飞控教学实验系统FCE400S-4D
四旋翼无人机飞控教学实验系统FCE400S-4D是集教学与科研目的为一体的多功能实验台,其在满足日常 学生教学实验的同时,兼顾无人机姿态控制、导航制导、力学等学科专业的科学研究。
概述
四旋翼无人机飞控教学实验系统FCE400S-4D是集教学与科研目的为一体的多功能实验台,其在满足日常 学生教学实验的同时,兼顾无人机姿态控制、导航制导、力学等学科专业的科学研究。本平台采用先进的基于 模型的设计(MBD)方法和代码自动生成等技术,可支撑控制系统数学仿真、半实物仿真、台架实验、外场实 验,具备模型编译、下载、数据监视记录、后处理等功能,能够帮助学生熟悉整套控制系统设计流程。
四旋翼无人机飞控系统教学实验采用一体化设计,更方便,安全,非常适用于教学,可以满足飞行器控制 与信息工程、无人机应用技术、电子信息,自动化,测控等专业的要求,从简单到复杂,理论联系实际,实验 结果清晰,实验内容生动有趣,对培养学生的实践动手能力,工程设计、创新能力,是非常合适的平台。是电 子信息、自动化、测控专业工程教育实训、新工科建设、一流学科建设的绝佳平台。
基于此系统,可以完成《传感器技术与应用》、《STM32系统开发》、《控制算法程序设计》、《无人机飞 行控制系统》、《无人机测控系统》等课程的实验内容;可以完成专业课程设计、专业实训、毕业设计项目等多 环节的技能实践内容;可以做为大学生创新项目、电子设计竞赛、技能竞赛、机器人大赛等的开发平台。
特点
四旋翼无人机飞控系统教学实验采用一体化设计,更方便,安全,非常适用于教学,可以满足飞行器控制与信息工程、无人机应用技术、电子信息,自动化,测控等专业的要求,从简单到复杂,理论联系实际,实验结果清晰,实验内容生动有趣,对培养学生的实践动手能力,工程设计、创新能力,是非常合适的平台。是电子信息、自动化、测控专业工程教育实训、新工科建设、一流学科建设的绝佳平台。
适用范围
基于此系统,可以完成《传感器技术与应用》、《STM32系统开发》、《控制算法程序设计》、《无人机飞行控制系统》、《无人机测控系统》等课程的实验内容;可以完成专业课程设计、专业实训、毕业设计项目等多环节的技能实践内容;可以做为大学生创新项目、电子设计竞赛、技能竞赛、机器人大赛等的开发平台。
教学实验示例
1.基础实验
(1) 流水灯实验(2) 蜂鸣器实验(3) 键盘及外部中断实验(4) 定时/计数器实验(5) 串口通信实验(6) IIC通信实验(7) SPI通信及液晶屏显示实验(8) A/D采集实验:由一路可变电阻组成,通过调节电阻值改变电压输出,用于A/D采集实验。
2.传感器实验
(1) 陀螺仪实验(2) 加速度计实验(3) 磁力计实验(4) 气压高度实验(5) 超声波实验(6) 激光高度测量实验(7) GPS实验(8) 电流电压检测实验
3. 飞行控制实验
(1) 电机控制实验(2) 姿态测量实验(3) 姿态解算实验(4) 卡尔曼滤波高度融合实验(5) PID反馈控制实验(6) 基于双闭环PID的无人机姿态控制实验(7) 模拟飞行实验(8) 基于颜色的绿球跟踪实验。
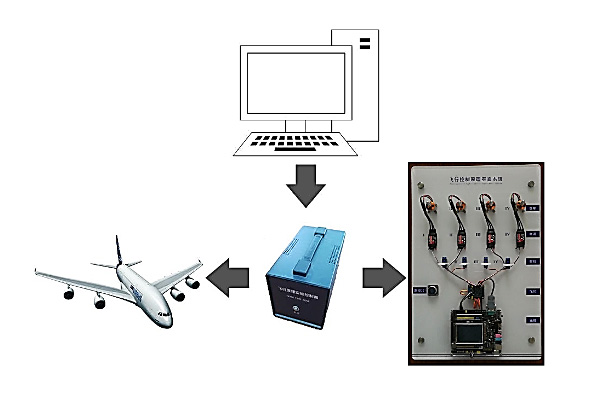
系统组成
系统的硬件设备主要由四旋翼无人机飞控教学实验箱、测控计算机及配套教学实验应用软件构成,规格如下:
|
产品名称 |
产品型号 |
技术规格 |
功能描述 |
|
四旋翼无人机飞控实验箱 |
FCE400S-4D |
尺寸:400mm*400mm*160mm实验箱; 飞控系统:采用STM32F427主控及STM32F100协处理器; 无人机姿态运动范围:偏航360°、俯仰/滚转±30° 供电:AC 220V 50Hz |
四旋翼无人机安装在实验箱可升降机构上 |
|
测控计算机 |
联想 |
操作系统:Windows 7/10;CPU主频:2.41GHz;屏幕尺寸:15英寸;内存容量:≥4GB (DDR3);硬盘容量:≥64GB; |
通用计算机系统,用于测试与、控制以及对应的实验内容 |
|
配套软件 |
- |
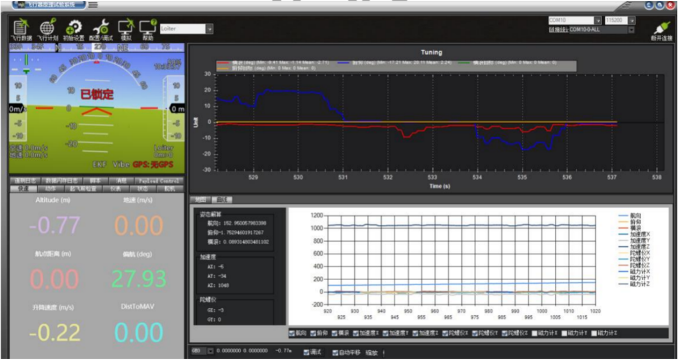
MATLAB 2016b/MATLAB 2017b 软件及程序 C编译器和Code Sourcery ARM 编译器; px4 的toolchain、Cmake-3.6.0-rc3-win64-x64、Pixhawk-R2016b_v2.1_win64-Install 无人机实验软件包; 地面站软件。 |
用于四旋翼无人机飞控原理的教学实验及开发 |
 首页
首页
 产品中心
产品中心
 新闻资讯
新闻资讯
 联系我们
联系我们